大家好,我最近完成了一个非常有趣且充满挑战的 C++ 项目:一个带有图形界面的、能够批量将 OSGB 倾斜摄影模型转换为 LAS/LAZ 点云的工具。这个过程远非一帆风顺,我遇到了从环境配置到性能优化的各种问题。我想把这段宝贵的“踩坑”和“填坑”经历记录下来,希望能给同样在 C++、CMake、vcpkg 以及 GIS 相关领域探索的朋友们一些启发。
技术栈选型 (The Stack):
- 核心语言: C++17
- 构建系统: CMake (版本 >= 3.15)
- 编译器: Visual Studio 2022 (MSVC)
- 包管理器: vcpkg
- 关键库: OSG, PDAL, ImGui, GLFW, TinyFileDialogs, TinyXML2
第一部分:项目构建与环境准备 (The Foundation)
在敲下第一行功能代码之前,我们需要搭建一个稳固的开发平台。对于一个依赖众多第三方库的C++项目来说,一个现代化的构建流程至关重要。
1.1 依赖管理:拥抱 vcpkg
手动下载、编译和配置每个库(OSG, PDAL, ImGui…)是一项繁琐且极易出错的工作。为了摆脱这个“依赖地狱”,我们选择 vcpkg 作为我们的包管理器。
只需几行简单的命令,就能自动完成所有库的下载、编译和集成:
# 安装所有需要的库 (x64架构)
.\vcpkg.exe install osg:x64-windows
.\vcpkg.exe install pdal[core,laszip,zlib]:x64-windows
.\vcpkg.exe install imgui[glfw-binding,opengl3-binding]:x64-windows
.\vcpkg.exe install glfw3:x64-windows
.\vcpkg.exe install tinyfiledialogs:x64-windowsvcpkg 会将所有头文件、库文件和DLL统一管理,为后续的CMake集成铺平了道路。
1.2 构建系统:CMake 的力量
我们使用 CMake 来定义项目的构建规则,这使得项目配置与平台和IDE解耦。下面是我们的 CMakeLists.txt 的核心结构。
# CMakeLists.txt (核心结构)
cmake_minimum_required(VERSION 3.15)
project(osgb2las_gui_converter CXX)
set(CMAKE_CXX_STANDARD 17)
set(CMAKE_CXX_STANDARD_REQUIRED ON)
# --- 全局编译选项 ---
# 1. 强制UTF-8编码,解决中文乱码
if(MSVC)
add_compile_options(/utf-8)
endif()
# 2. 定义Windows宏,并解决min/max宏冲突
add_definitions(-D_UNICODE -DUNICODE -DNOMINMAX)
# --- 查找依赖库 ---
# vcpkg 会帮助 CMake 找到这些包
find_package(OpenSceneGraph REQUIRED COMPONENTS osgDB osgUtil)
find_package(PDAL REQUIRED)
find_package(imgui CONFIG REQUIRED)
find_package(glfw3 CONFIG REQUIRED)
find_package(TinyFileDialogs CONFIG REQUIRED)
find_package(OpenGL REQUIRED)
find_package(Threads REQUIRED)
# --- 创建可执行文件 ---
# 注意:tinyxml2是直接将 .h 和 .cpp 文件加入项目,无需find_package
# WIN32 关键字用于生成无控制台的窗口应用
add_executable(osgb2las_gui_converter WIN32
src/main.cpp
src/tinyxml2.cpp
)
# --- 链接所有库 ---
target_link_libraries(osgb2las_gui_converter
PRIVATE
# 现代化的目标链接
imgui::imgui
glfw
TinyFileDialogs::tinyfiledialogs
OpenGL::GL
Threads::Threads
# 传统的变量链接
${OPENSCENEGRAPH_LIBRARIES}
${PDAL_LIBRARIES}
)
# --- 添加头文件目录 ---
target_include_directories(osgb2las_gui_converter
PRIVATE
${CMAKE_CURRENT_SOURCE_DIR}/src # 为了tinyxml2.h
# vcpkg的库通常会自动处理头文件目录,但为保险起见可以手动添加
${OPENSCENEGRAPH_INCLUDE_DIRS}
${PDAL_INCLUDE_DIRS}
)1.3 开发环境:Visual Studio 2022 与构建流程
有了 CMakeLists.txt,我们就可以生成 Visual Studio 项目并开始编码了。我们采用源码外构建 (Out-of-Source Build),这能保持项目目录的整洁。
构建流程:
- 创建
build目录: 在项目根目录下创建一个空的build文件夹。 - 运行 CMake 生成项目: 打开命令行,进入
build目录,然后运行:
cmake .. -DCMAKE_TOOLCHAIN_FILE="C:/path/to/your/vcpkg/scripts/buildsystems/vcpkg.cmake"
执行成功后,build目录里就会出现一个osgb2las_gui_converter.sln文件。 - 开发与编译:
- 开发: 直接用 Visual Studio 2022 打开这个
.sln文件进行代码编写和调试。 - 编译: 可以在 VS 内部点击“生成”,或者继续在
build目录的命令行中执行:
cmake --build . --config Release
最终的.exe文件会出现在build/Release目录下。
- 开发: 直接用 Visual Studio 2022 打开这个
至此,我们的开发平台已经完全就绪。这是一个现代、健壮、可维护的 C++ 项目结构,为我们后续的算法开发和踩坑之旅打下了坚实的基础。
第二部分:核心算法的史诗级演进
环境就绪,真正的算法挑战浮出水面。
2.1 内存的“饕餮盛宴”:从暴力加载到优雅流式处理
初始算法: 遍历所有.osgb -> 采样所有点 -> 存入一个巨大的std::vector -> 最后写入。
结果: 对于GB级别的输入,程序内存占用直线飙升,最终被操作系统无情终结。
解决方案流式传输 (Streaming with Buffer):
- 核心洞察: 内存是有限的,但磁盘是(相对)无限的。我们必须用磁盘I/O来换取内存的稳定。
- 实现: 创建一个临时的
.txt文件。在循环中,每处理完一个.osgb文件,就将采样点批量写入这个临时文件,然后清空内存缓冲区。所有文件处理完后,再让PDAL这个“外部专家”去处理那个包含了所有点的(可能非常大的)文本文件。
在 run_conversion 函数中,我们创建了一个内存缓冲区,并在处理完每个文件后批量写入磁盘。
// run_conversion 函数内
// 在循环外创建临时文件流和内存缓冲区
fs::path temp_txt_path = fs::temp_directory_path() / "osgb2las_temp.txt";
std::ofstream temp_file(temp_txt_path, std::ios::out | std::ios::trunc);
std::vector<PointData> points_buffer;
points_buffer.reserve(1000000); // 预分配以提高效率
// 遍历所有osgb文件
for (size_t i = 0; i < osgb_files.size(); ++i) {
points_buffer.clear(); // 每次循环清空缓冲区
// ... (加载osgb,采样生成点) ...
for (long long j = 0; j < num_points_for_this_file; ++j) {
// ... (计算出点的位置 p_global 和颜色 r, g, b)
// 先存入内存缓冲区,而不是直接写文件
points_buffer.push_back({p_global, r, g, b});
}
// 处理完一个文件后,将缓冲区内容批量写入磁盘
for (const auto& point_data : points_buffer) {
temp_file << /* ... 格式化输出 ... */ << "\n";
}
}
temp_file.close();
// 最后,让 PDAL 处理这个完整的临时文件
// ...2.2 点数大爆炸:表面积 vs. 占地面积
初始算法: 点数 = 表面积 / (点间距^2)。
结果: 一个几百KB的文件生成了上亿个点。为什么?
根源: 我混淆了三维表面积 (Surface Area) 和 二维占地面积 (Footprint Area)。GIS应用中,点密度(如 pts/m²)几乎总是指单位占地面积上的点数。
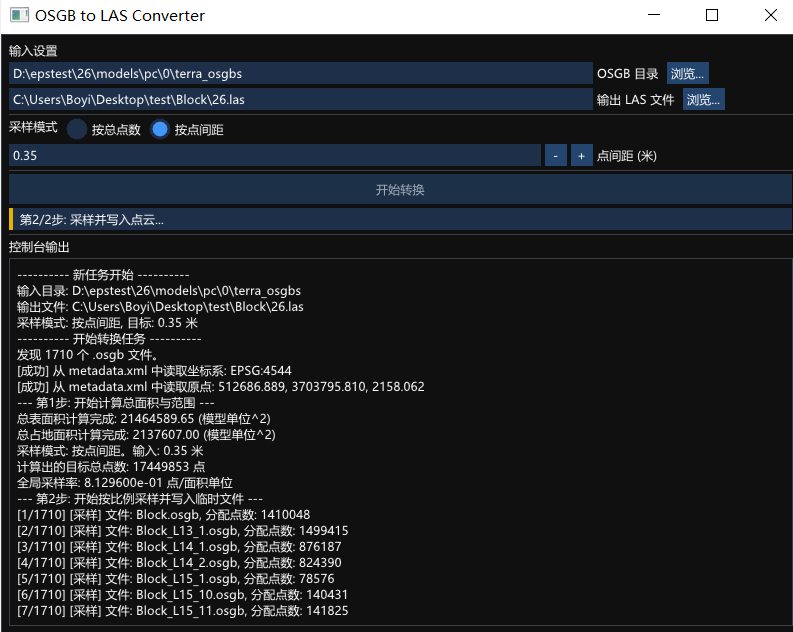
进化 (两遍扫描算法):
- 第一遍:侦察 (Reconnaissance): 快速遍历所有文件,计算出总表面积 (Total Surface Area) 和总包围盒 (Total Bounding Box)。
- 计算占地面积:
总占地面积 = (总包围盒.Xmax - Xmin) * (总包围盒.Ymax - Ymin)。 - 推导采样率:
- 如果用户按“点间距”模式,则
目标总点数 = 总占地面积 / (点间距^2)。 全局采样率 = 目标总点数 / 总表面积。
- 如果用户按“点间距”模式,则
- 第二遍:执行 (Execution): 再次遍历文件,对每个文件,根据
它的表面积 * 全局采样率分配点数配额,然后进行采样。
这个算法的核心逻辑在 run_conversion 函数中实现:
// run_conversion 函数内
// --- Pass 1: 计算总表面积和总包围盒 ---
double total_surface_area = 0.0;
osg::BoundingBox total_bbox;
for (/* ... 遍历所有文件 ... */) {
// ...
total_surface_area += current_file_area;
total_bbox.expandBy(file_bounding_box);
}
// --- 根据用户模式计算目标总点数 ---
double total_footprint_area = (total_bbox.xMax() - total_bbox.xMin()) * (total_bbox.yMax() - total_bbox.yMin());
long long finalTotalPoints = 0;
if (state.samplingMode == SamplingMode::ByPointSpacing) {
// 关键:使用占地面积来解释“点间距”
finalTotalPoints = static_cast<long long>(total_footprint_area / (state.pointSpacing * state.pointSpacing));
} else {
finalTotalPoints = state->totalPointsToSample;
}
// --- 计算全局采样率,分母仍然是表面积 ---
double global_sampling_rate = static_cast<double>(finalTotalPoints) / total_surface_area;
// --- Pass 2: 按比例采样 ---
// ...2.3 “幽灵”数据:点云的颜色与坐标修正
挑战1:点云没有颜色。
洞察: 倾斜摄影模型通过纹理贴图实现赋色。
解决方案: 深入OSG的渲染状态 (StateSet),提取出应用于几何体的osg::Texture2D对象,并从中获取osg::Image。在采样时,通过重心坐标对顶点的UV坐标进行插值,然后用插值后的UV坐标在osg::Image上进行像素查找,得到精确的颜色值。
// run_conversion 的采样循环内
osg::Vec2 uv = chosen_tri.v0_uv * w0 + chosen_tri.v1_uv * r1 + chosen_tri.v2_uv * r2;
osg::Vec4 color_f = chosen_tri.image->getColor(uv);挑战2:坐标“离家出走”。

洞察: .osgb 数据集通常是“局部中心化”的,其顶点坐标是相对于一个局部原点的偏移。这个原点的全局坐标被存储在metadata.xml的<SRSOrigin>标签中。
解决方案: 解析XML,获取SRSOrigin。在得到每个采样点的局部坐标p_local后,执行一次简单的向量加法:p_global = p_local + SRSOrigin。
// run_conversion 函数内
// 首先,在任务开始时解析元数据
SrsInfo srs_info = getSrsInfoFromMetadata(state->inputDir, state);
// ... 在采样循环中 ...
// p_local 是通过插值得到的、相对于模型中心的坐标
osg::Vec3d p_local = chosen_tri.v0 + (chosen_tri.v1 - chosen_tri.v0) * r1 + ...;
// 应用全局偏移,得到最终坐标
osg::Vec3d p_global = p_local + srs_info.origin;第三部分:终极考验 - 软件分发
代码在本地完美运行,但如何让它在“世界”的任何角落都能跑起来?
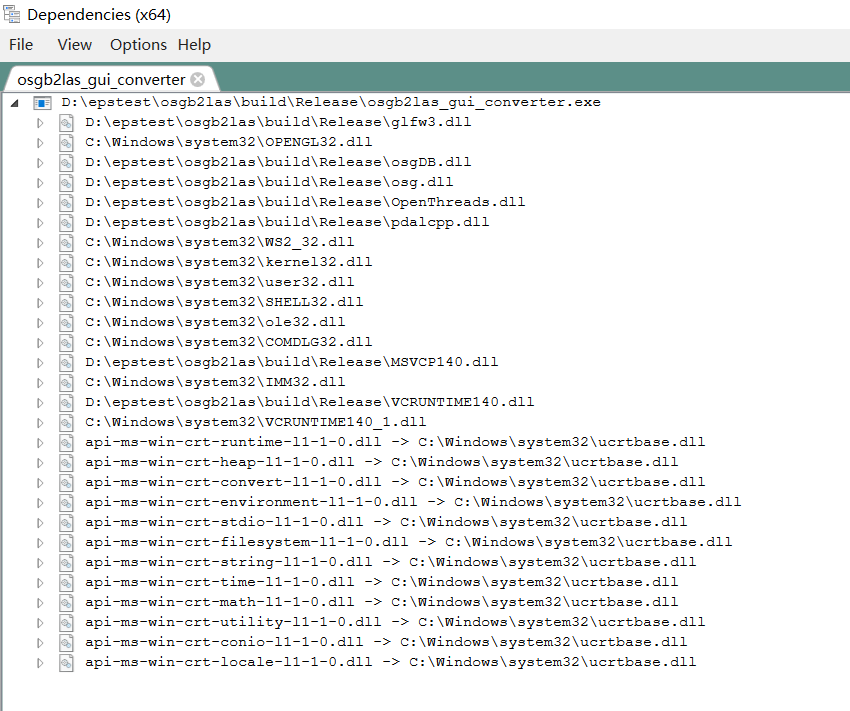
3.1 “DLL地狱”与依赖追踪
挑战: 程序在新环境中因“找不到 xxx.dll”而无法启动。
解决方案:
- 侦察工具: 使用 Dependencies 工具,这是一个现代化的Dependency Walker,可以清晰地列出
.exe的所有直接和间接依赖。 - 打包策略:
- 核心DLLs: 所有
vcpkg安装的、非系统的核心库DLL(osg.dll,pdalcpp.dll,proj.dll等),直接复制到与.exe同级的目录。 - 插件DLLs: 为OSG插件创建一个
osgPlugins子目录,并将所有osgdb_*.dll放入其中。 - 数据文件: 为PROJ库创建一个
share/proj的子目录结构,并将proj.db等数据文件放入其中。
- 核心DLLs: 所有
3.2 运行环境的“自知之明”
挑战: 即使文件都已就位,程序依然找不到插件和数据,因为它是个“路痴”。
解决方案: 让程序变得“自知”。在main()函数的开头,通过平台API(如Windows的GetModuleFileNameA)获取.exe自身的路径。然后,基于这个路径动态构建到osgPlugins和share/proj的相对路径,并通过代码设置OSG_LIBRARY_PATH和PROJ_DATA这两个关键的环境变量。
// main.cpp 的 main 函数开头
// 获取可执行文件路径的辅助函数
std::string get_executable_path() {
#ifdef _WIN32
char path[MAX_PATH] = { 0 };
GetModuleFileNameA(NULL, path, MAX_PATH);
return std::string(path);
#else
// Linux/macOS 实现
#endif
}
int main(int, char**) {
#ifdef _WIN32
// 1. 获取exe所在目录
std::filesystem::path exe_dir = std::filesystem::path(get_executable_path()).parent_path();
// 2. 构建到插件和数据目录的相对路径
std::string proj_data_path = (exe_dir / "share" / "proj").string();
std::string osg_plugin_path = (exe_dir / "osgPlugins").string();
// 3. 设置环境变量,为OSG和PROJ库“指路”
_putenv_s("PROJ_DATA", proj_data_path.c_str());
_putenv_s("OSG_LIBRARY_PATH", osg_plugin_path.c_str());
#endif
// ... 程序的主逻辑开始 ...
}旅程终点
从一个简单的想法开始,最终演变成一场对C++生态、GIS算法和软件工程实践的深度探索。我们驯服了编码、解决了逻辑谬误、战胜了环境依赖。最终的成品不仅功能强大,其背后的开发过程更是一份宝贵的经验财富。
对于所有热爱钻研技术的开发者来说,正是这些看似棘手的难题,才让编码变得如此富有挑战和乐趣。

